Destino Futuro






En nuestro país es alto el porcentaje de accidentes de tránsito. Según el informe de siniestralidad del primer semestre del año 2021, unas 10.450 personas resultaron lesionadas en un accidente de tránsito, de las cuales el 2% fallecieron. Muchos de estos accidentes son causados por distracción del conductor, problemas mecánicos, falta de visibilidad, entre otras causas. El porcentaje más alto de heridos graves y de fallecidos se da por colisiones de vehículos. En nuestra localidad, San Ramón, un factor de riesgo de las colisiones entre vehículos son las “esquinas peligrosas”, en las que la visibilidad es muy poca o nula y no existe ningún tipo de indicación, ni mucho menos semáforos.
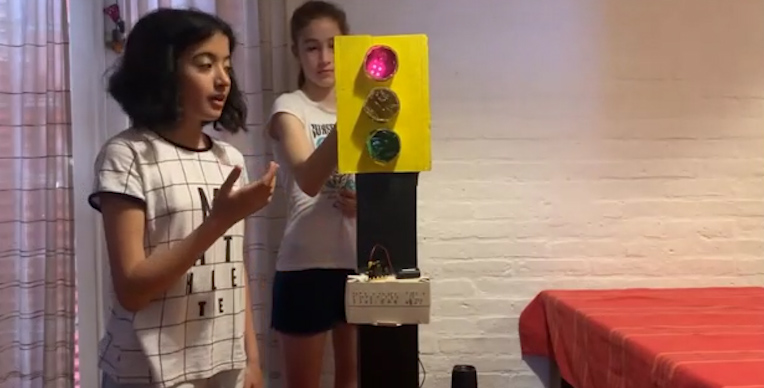
Para evitar este tipo de colisiones o choques entre vehículos en las esquinas con poca o nula visibilidad se creó un prototipo de sensor que da aviso al vehículo que viene transitando por una de las calles y que debe parar en la esquina al circular otro vehículo por la otra calle. Este sensor, al detectar que un vehículo se acerca a la esquina, enseguida emite una señal a través de bluetooth que es captada por el vehículo que transita por la otra calle, el cual responde inmediatamente parando para no colisionar en la esquina con el otro vehículo que viene circulando. El vehículo será capaz de interactuar con las señales de tránsito y otros dispositivos como semáforos, cámaras o sensores. En este prototipo se emplearon un sensor y dos robots vehículos. El sensor se compone de un brick NXT y un sensor de distancia. Los vehículos 1 y 2 constan de un brick NXT, un sensor de luz, un sensor de contacto y dos motores. También se realizó una maqueta como escenario para demostrar mejor la idea. Por una parte, circula el vehículo 1 por la calle (1), que es el que se conecta con el sensor que se encuentra ubicado en la esquina sobre la otra calle (2). Al pasar el vehículo 2 por la calle (2) para doblar en la calle (1), se activa el sensor, que emite una señal para dar aviso al vehículo 1, que viene circulando por la calle 1. Al recibir la señal, este para y evita la colisión. Los robots se programaron en NXT 2.0 Programs. Esta solución se puede aplicar en un auto real, ya que es posible colocar sensores en las esquinas con poca visibilidad y que puedan emitir una señal (posiblemente satelital) para dar aviso al acercarse un auto por la otra calle. El auto podría reaccionar frente a esta señal y detener paulatinamente la marcha por unos instantes.